HashMap
ConcurrentHashMap
LinkedHashMap
HashMap 成员变量 1 2 3 4 5 6 7 8 9 10 11 12 13 //最大容量 2的30次方 static final int MAXIMUM_CAPACITY = 1 << 30; //默认的加载因子 static final float DEFAULT_LOAD_FACTOR = 0.75f; //哈希桶,存放链表。 长度是2的N次方,或者初始化时为0. transient Node<K,V>[] table; //加载因子,用于计算哈希表元素数量的阈值。 threshold = 哈希桶.length * loadFactor; final float loadFactor; //哈希表内元素数量的阈值,当哈希表内元素数量超过阈值时,会发生扩容resize()。 int threshold;
桶个数的计算 在构造函数中传入了初始大小的话,会根据当前值计算hash桶的个数
1 2 3 4 5 6 7 8 9 10 11 12 //根据期望容量cap,返回2的n次方形式的 哈希桶的实际容量 length。 返回值一般会>=cap static final int tableSizeFor(int cap) { //经过下面的 或 和位移 运算, n最终各位都是1。 int n = cap - 1; n |= n >>> 1; n |= n >>> 2; n |= n >>> 4; n |= n >>> 8; n |= n >>> 16; //判断n是否越界,返回 2的n次方作为 table(哈希桶)的阈值 return (n < 0) ? 1 : (n >= MAXIMUM_CAPACITY) ? MAXIMUM_CAPACITY : n + 1; }
hash计算 1 2 3 4 5 HashMap: static final int hash(Object key) { int h; return (key == null) ? 0 : (h = key.hashCode()) ^ (h >>> 16); }
Node的hash值计算 1 2 3 4 5 HashMap#Node: public final int hashCode() { return Objects.hashCode(key) ^ Objects.hashCode(value); }
扩容 初始化或加倍哈希桶大小。如果是当前哈希桶是null,分配符合当前阈值的初始容量目标。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 final Node<K,V>[] resize() { //oldTab 为当前表的哈希桶 Node<K,V>[] oldTab = table; //当前哈希桶的容量 length int oldCap = (oldTab == null) ? 0 : oldTab.length; //当前的阈值 int oldThr = threshold; //初始化新的容量和阈值为0 int newCap, newThr = 0; //如果当前容量大于0 if (oldCap > 0) { //如果当前容量已经到达上限 if (oldCap >= MAXIMUM_CAPACITY) { //则设置阈值是2的31次方-1 threshold = Integer.MAX_VALUE; //同时返回当前的哈希桶,不再扩容 return oldTab; }//否则新的容量为旧的容量的两倍。 else if ((newCap = oldCap << 1) < MAXIMUM_CAPACITY && oldCap >= DEFAULT_INITIAL_CAPACITY)//如果旧的容量大于等于默认初始容量16 //那么新的阈值也等于旧的阈值的两倍 newThr = oldThr << 1; // double threshold }//如果当前表是空的,但是有阈值。代表是初始化时指定了容量、阈值的情况 else if (oldThr > 0) // initial capacity was placed in threshold newCap = oldThr;//那么新表的容量就等于旧的阈值 else {}//如果当前表是空的,而且也没有阈值。代表是初始化时没有任何容量/阈值参数的情况 // zero initial threshold signifies using defaults newCap = DEFAULT_INITIAL_CAPACITY;//此时新表的容量为默认的容量 16 newThr = (int)(DEFAULT_LOAD_FACTOR * DEFAULT_INITIAL_CAPACITY);//新的阈值为默认容量16 * 默认加载因子0.75f = 12 } if (newThr == 0) {//如果新的阈值是0,对应的是 当前表是空的,但是有阈值的情况 float ft = (float)newCap * loadFactor;//根据新表容量 和 加载因子 求出新的阈值 //进行越界修复 newThr = (newCap < MAXIMUM_CAPACITY && ft < (float)MAXIMUM_CAPACITY ? (int)ft : Integer.MAX_VALUE); } //更新阈值 threshold = newThr; @SuppressWarnings({"rawtypes","unchecked"}) //根据新的容量 构建新的哈希桶 Node<K,V>[] newTab = (Node<K,V>[])new Node[newCap]; //更新哈希桶引用 table = newTab; //如果以前的哈希桶中有元素 //下面开始将当前哈希桶中的所有节点转移到新的哈希桶中 if (oldTab != null) { //遍历老的哈希桶 for (int j = 0; j < oldCap; ++j) { //取出当前的节点 e Node<K,V> e; //如果当前桶中有元素,则将链表赋值给e if ((e = oldTab[j]) != null) { //将原哈希桶置空以便GC oldTab[j] = null; //如果当前链表中就一个元素,(没有发生哈希碰撞) if (e.next == null) //直接将这个元素放置在新的哈希桶里。 //注意这里取下标 是用 哈希值 与 桶的长度-1 。 由于桶的长度是2的n次方,这么做其实是等于 一个模运算。但是效率更高 newTab[e.hash & (newCap - 1)] = e; //如果发生过哈希碰撞 ,而且是节点数超过8个,转化成了红黑树(暂且不谈 避免过于复杂, 后续专门研究一下红黑树) else if (e instanceof TreeNode) ((TreeNode<K,V>)e).split(this, newTab, j, oldCap); //如果发生过哈希碰撞,节点数小于8个。则要根据链表上每个节点的哈希值,依次放入新哈希桶对应下标位置。 else { // preserve order //因为扩容是容量翻倍,所以原链表上的每个节点,现在可能存放在原来的下标,即low位, 或者扩容后的下标,即high位。 high位= low位+原哈希桶容量 //低位链表的头结点、尾节点 Node<K,V> loHead = null, loTail = null; //高位链表的头节点、尾节点 Node<K,V> hiHead = null, hiTail = null; Node<K,V> next;//临时节点 存放e的下一个节点 do { next = e.next; //这里又是一个利用位运算 代替常规运算的高效点: 利用哈希值 与 旧的容量,可以得到哈希值去模后,是大于等于oldCap还是小于oldCap,等于0代表小于oldCap,应该存放在低位,否则存放在高位 if ((e.hash & oldCap) == 0) { //给头尾节点指针赋值 if (loTail == null) loHead = e; else loTail.next = e; loTail = e; }//高位也是相同的逻辑 else { if (hiTail == null) hiHead = e; else hiTail.next = e; hiTail = e; }//循环直到链表结束 } while ((e = next) != null); //将低位链表存放在原index处, if (loTail != null) { loTail.next = null; newTab[j] = loHead; } //将高位链表存放在新index处 if (hiTail != null) { hiTail.next = null; newTab[j + oldCap] = hiHead; } } } } } return newTab; }
当前容量大于0且不超过最大值(1 << 30),扩容2倍
如果当前表是空的,但是有阈值,那么新表的容量就等于旧的阈值
如果当前表是空的,而且也没有阈值.新表的容量为默认的容量 16
扩容后赋值 先根据原有的桶,进行取值,形成新的链表。
1 2 //使用hashCode和新桶的容量进行位运算,且赋值 newTab[e.hash & (newCap - 1)] = e;
如果当前桶发生了hash碰撞,原链表上的每个节点,现在可能存放在原来的下标,即low位, 或者扩容后的下标,即high位。 high位= low位+原哈希桶容量。将低位链表存放在原index处,将高位链表存放在新index处 。
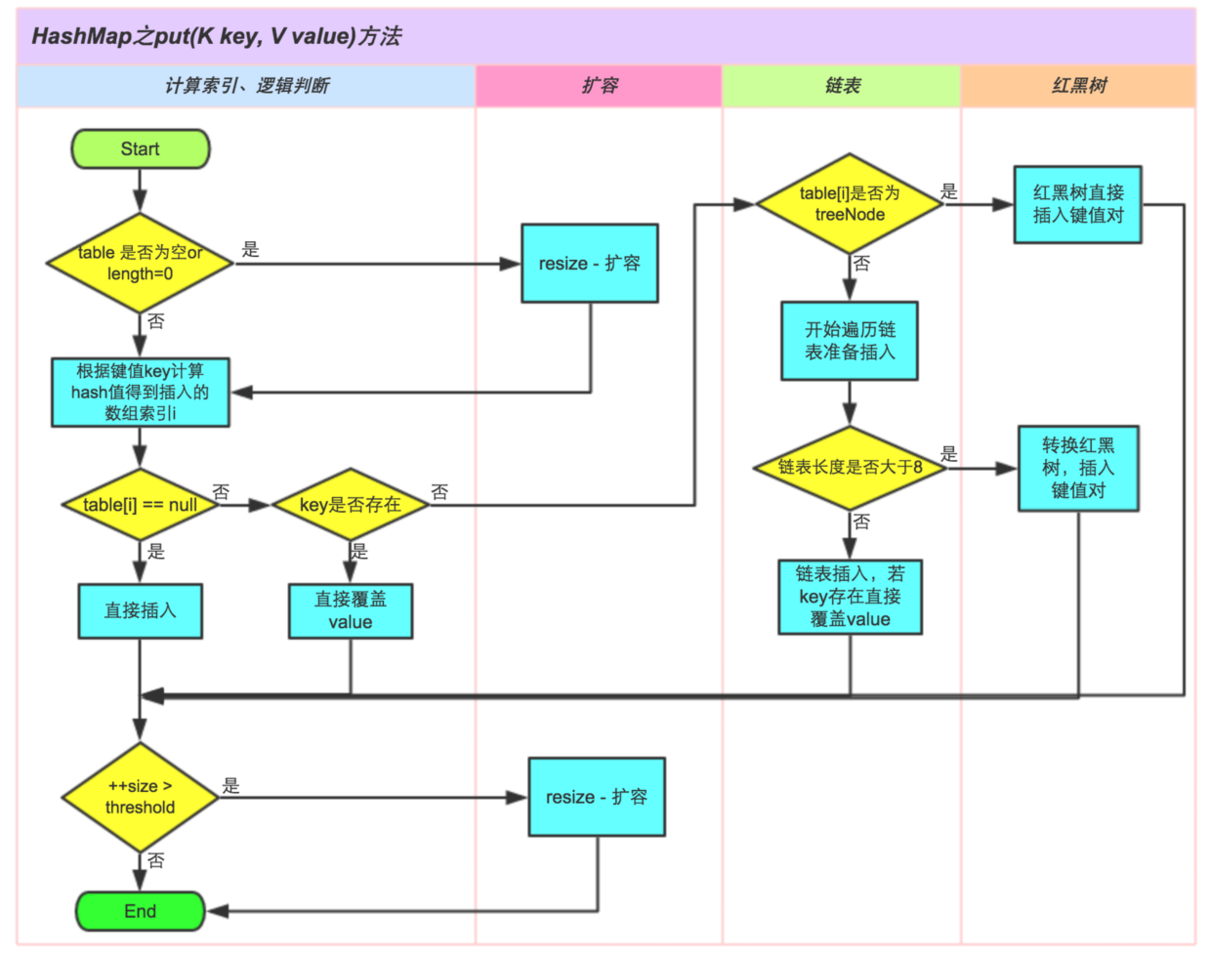
put操作 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 final V putVal(int hash, K key, V value, boolean onlyIfAbsent, boolean evict) { //tab存放 当前的哈希桶, p用作临时链表节点 Node<K,V>[] tab; Node<K,V> p; int n, i; //如果当前哈希表是空的,代表是初始化 if ((tab = table) == null || (n = tab.length) == 0) //那么直接去扩容哈希表,并且将扩容后的哈希桶长度赋值给n n = (tab = resize()).length; //如果当前index的节点是空的,表示没有发生哈希碰撞。 直接构建一个新节点Node,挂载在index处即可。 //这里再啰嗦一下,index 是利用 哈希值 & 哈希桶的长度-1,替代模运算 if ((p = tab[i = (n - 1) & hash]) == null) tab[i] = newNode(hash, key, value, null); else {//否则 发生了哈希冲突。 //e Node<K,V> e; K k; //如果哈希值相等,key也相等,则是覆盖value操作 if (p.hash == hash && ((k = p.key) == key || (key != null && key.equals(k)))) e = p;//将当前节点引用赋值给e else if (p instanceof TreeNode)//红黑树暂且不谈 e = ((TreeNode<K,V>)p).putTreeVal(this, tab, hash, key, value); else {//不是覆盖操作,则插入一个普通链表节点 //遍历链表 for (int binCount = 0; ; ++binCount) { if ((e = p.next) == null) {//遍历到尾部,追加新节点到尾部 p.next = newNode(hash, key, value, null); //如果追加节点后,链表数量》=8,则转化为红黑树 if (binCount >= TREEIFY_THRESHOLD - 1) // -1 for 1st treeifyBin(tab, hash); break; } //如果找到了要覆盖的节点 if (e.hash == hash && ((k = e.key) == key || (key != null && key.equals(k)))) break; p = e; } } //如果e不是null,说明有需要覆盖的节点, if (e != null) { // existing mapping for key //则覆盖节点值,并返回原oldValue V oldValue = e.value; if (!onlyIfAbsent || oldValue == null) e.value = value; //这是一个空实现的函数,用作LinkedHashMap重写使用。 afterNodeAccess(e); return oldValue; } } //如果执行到了这里,说明插入了一个新的节点,所以会修改modCount,以及返回null。 //修改modCount ++modCount; //更新size,并判断是否需要扩容。 if (++size > threshold) resize(); //这是一个空实现的函数,用作LinkedHashMap重写使用。 afterNodeInsertion(evict); return null; }
如果桶是空的,先初始化和扩容,并将元素放到计算的索引上
如果当前index的节点是空的,表示没有发生哈希碰撞。 直接构建一个新节点Node,挂载在index处即可
如果发生了hash冲突
如果哈希值相等,key也相等,则是覆盖value操作
遍历到尾部,追加新节点到尾部
修改modCount
判断是否要扩容
为什么是线程不安全的 在并发环境下,可能会形成环状链表(扩容时可能造成,具体原因自行百度google或查看源码分析),导致get操作时,cpu空转,所以,在并发环境中使用HashMap是非常危险的
为什么进行2倍扩容 树化 最小链表化阈值为 6
LinkedHashMap 集成自HashMap
1 2 3 4 5 6 7 8 9 10 11 // Callbacks to allow LinkedHashMap post-actions void afterNodeAccess(Node<K,V> p) { } void afterNodeInsertion(boolean evict) { } //回调函数,新节点插入之后回调 , 根据evict 和 判断是否需要删除最老插入的节点。如果实现LruCache会用到这个方法。 void afterNodeRemoval(Node<K,V> p) { } Node<K,V> newNode(int hash, K key, V value, Node<K,V> e){ } //LinkedHashMap 默认返回false 则不删除节点。 返回true 代表要删除最早的节点。通常构建一个LruCache会在达到Cache的上限是返回true protected boolean removeEldestEntry(Map.Entry<K,V> eldest) { return false; }
类里有两个成员变量head tail,分别指向内部双向链表的表头、表尾。
1 2 3 4 5 6 7 8 9 10 //双向链表的头结点 transient LinkedHashMap.Entry<K,V> head; //双向链表的尾节点 transient LinkedHashMap.Entry<K,V> tail; //默认是false,则迭代时输出的顺序是插入节点的顺序。若为true,则输出的顺序是按照访问节点的顺序。 //为true时,可以在这基础之上构建一个LruCach final boolean accessOrder;
LinkedHashMap重写了newNode(),在每次构建新节点时,通过linkNodeLast(p);将新节点链接在内部双向链表的尾部。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 //在构建新节点时,构建的是`LinkedHashMap.Entry` 不再是`Node`. Node<K,V> newNode(int hash, K key, V value, Node<K,V> e) { LinkedHashMap.Entry<K,V> p = new LinkedHashMap.Entry<K,V>(hash, key, value, e); linkNodeLast(p); return p; } //将新增的节点,连接在链表的尾部 private void linkNodeLast(LinkedHashMap.Entry<K,V> p) { LinkedHashMap.Entry<K,V> last = tail; tail = p; //集合之前是空的 if (last == null) head = p; else {//将新节点连接在链表的尾部 p.before = last; last.after = p; } }
LruCache LRU为Least Recently Used的缩写,意思也就是近期最少使用算法。LruCache将LinkedHashMap的顺序设置为LRU顺序来实现LRU缓存,每次调用get并获取到值(也就是从内存缓存中命中),则将该对象移到链表的尾端。调用put插入新的对象也是存储在链表尾端,这样当内存缓存达到设定的最大值时,将链表头部的对象(近期最少用到的)移除。
基于LinkedHashMap的LRUCache的实现,关键是重写LinkedHashMap的removeEldestEntry方法,在LinkedHashMap中该方法默认返回false(LRUCache本身未考虑线程安全的问题),这样此映射的行为将类似于正常映射,即永远不能移除最旧的元素。
ConcurrentHashMap